ВПнМ/Теормин
Материал из eSyr's wiki.
(→Автоматы Бюхи. Омега-допускание. Расширение автоматов Бюхи.) |
(→Размеченная система переходов (LTS)) |
||
| Строка 42: | Строка 42: | ||
* <math>Post(s) = \bigcup_{a \in Act} Post(s, a)</math> - все возможные состояния s', которые <u>непосредственно вытекают</u> из s | * <math>Post(s) = \bigcup_{a \in Act} Post(s, a)</math> - все возможные состояния s', которые <u>непосредственно вытекают</u> из s | ||
| - | Система <math>TS = \langle S, Act, \overset{a}{\rightarrow} , | + | Система <math>TS = \langle S, Act, \overset{a}{\rightarrow} ,I, AP, L \rangle</math> '''детерминирована''': |
* '''по действиям''' тогда и только тогда, когда | * '''по действиям''' тогда и только тогда, когда | ||
** <math>|I| \leqslant 1</math> | ** <math>|I| \leqslant 1</math> | ||
| Строка 51: | Строка 51: | ||
| - | ''' | + | '''Недетерминизм''' - это фича! Полезен для: |
* моделирования параллельного выполнения в режиме чередования (интерливинга) | * моделирования параллельного выполнения в режиме чередования (интерливинга) | ||
** позволяет не указывать скорость выполнения процессов | ** позволяет не указывать скорость выполнения процессов | ||
Версия 10:01, 21 мая 2009
Моделирование и абстракция
Моделирование программ. Понятие состояния. Потенциальные и достижимые состояния. Требования к модели. Процесс построения модели.
Схема верификации на моделях (Лекция 2, слайд 3)
Состояние программы - совокупность значений переменных и управления, связанных с некоторой моделью программы.
Модель - упрощённое описание реальности, выполненное с определенной целью.
- с каждым объектом может быть связано несколько моделей
- каждая модель отражает свой аспект реальности
Аспекты модели:
- простота - модель должна быть проще, чем реальность
- корректность - не расходиться с реальностью
- адекватность - соответствовать решаемой задаче
Построение модели
- формализация требований (постановка задачи моделирования)
- выбор языка моделирования
- абстракция системы до модели с учётом требований
Моделирование программ. Размеченные системы переходов. Детерминизм и недетерминизм. Вычисления и трассы. Свойства линейного времени. Выполнимость свойства на трассе.
Размеченная система переходов (LTS)

- S - множество состояний
- Act - множество действий
- τ - невидимое действие
-
 - тотальное отношение переходов
- тотальное отношение переходов
-
 - начальное состояние
- начальное состояние
- AP - множество атомарных высказываний
-
 - функция разметки
- функция разметки
S, Act - конечные или счётные множества

Пример LTS: Лекция 2, слайд 40-41
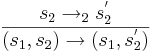
Прямые потомки
-
 - такие состояния s', которые непосредственно вытекают из s через переход a
- такие состояния s', которые непосредственно вытекают из s через переход a
-
 - все возможные состояния s', которые непосредственно вытекают из s
- все возможные состояния s', которые непосредственно вытекают из s
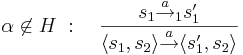
Система  детерминирована:
детерминирована:
- по действиям тогда и только тогда, когда
-
- по атомарным высказываниям
-

-
 ( количество одинаково размеченных потомков не больше одного )
( количество одинаково размеченных потомков не больше одного )
-

Недетерминизм - это фича! Полезен для:
- моделирования параллельного выполнения в режиме чередования (интерливинга)
- позволяет не указывать скорость выполнения процессов
- моделирования прототипа системы
- не ограничивает реализацию заданным порядком выполнения операторов
- построения абстракции реальной системы
- модель может быть построена по неполной информации
Вычисления
- Конечный фрагмент вычисления σ системы переходов TS - это конечная последовательность чередующихся состояний и действий, заканчивающаяся состоянием:

- Бесконечный (максимальный) фрагмент вычисления ρ -

- Начальный фрагмент вычисления - фрагмент вычисления, для которого

- Вычисление - начальный максимальный фрагмент вычисления
Достижимое состояние (из начального) в системе переходов TS - такое состояние  , для которого существует конечный фрагмент вычисления
, для которого существует конечный фрагмент вычисления 
Reach(TS) - множество всех достижимых состояний в TS
Трасса 
Свойства линейного времени
- Свойство
 определяет набор допустимых трасс:
определяет набор допустимых трасс: 
- Система переходов TS удовлетворяет свойству линейного времени
-

-
 - по определению программа удовлетворяет свойству φ, если её система переходов удовлетворяет этому свойству
- по определению программа удовлетворяет свойству φ, если её система переходов удовлетворяет этому свойству
-
Моделирование программ. Графы программ. Статическая и операционная семантика.
Граф программы – формальное описание текста программы.
- Dp -- единый абстрактный домен данных.
- P -- программа.
- Vp -- множество переменных программы(Var).
-

-
 -- каждая переменная принадлежит какому-либо домену
-- каждая переменная принадлежит какому-либо домену
-
- n -- подстановка.


- Cond(Vp) -- Набор булевых условий над Vp
- формулы пропозициональной логики
- условия на переменные
- Eval(Var) -- множество значений переменных.
- Эффект операторов:

Граф программы:

- Loc -- множество точек
-
 -- множество начальных точек
-- множество начальных точек
-
- Act -- множество действий
-
 -- отношение перехода (Cond(Vp) -- это фактически страж оператора )
-- отношение перехода (Cond(Vp) -- это фактически страж оператора )
- Effect -- функция эффекта
-
 -- начальное условие
-- начальное условие
Получение TS из PG: раскрутка графа
- Состояние в TS -- это точка программы и текущая подстановка
- Начальное состояние -- исходная точка, удовлетворяющая начальному условию
- Атомарные высказывания в TS:
- находимся в точке программы l
- значение переменной x принадлежит некоторому множеству и это множество является подмножеством множеств значений этой переменной.
- Состояния
 размечаются высказыванием о том, что мы находимся в точке программы l и всеми высказываниями, истинными в n
размечаются высказыванием о том, что мы находимся в точке программы l и всеми высказываниями, истинными в n
- Если в графе программы есть дуга из l в l' со стражем g и действием a и в некоторой подстановке n выполняется страж g, то в системе переходов, которая соответствует этой программе будет присутствовать дуга из состояния в состояние
 по действию a.
по действию a.
Системы переходов графов программ
Операционная семантика -- строгое описание того как из графа программы получить ее систему переходов. Описывается это все при помощи правил вывода.
TS(PG) -- система переходов графа программы задается сигнатурой 
-
 (декартово произведение точек программы на всевозможные подстановки)
(декартово произведение точек программы на всевозможные подстановки)
-
 с соответствующим правилом вывода
с соответствующим правилом вывода 
- Множество начальных состояний системы переходов описывается как множество состояний, в которых точка программы принадлежит начальным точкам, а на подстановках выполняется начальное условие графа программы:
-
- Множество атомарных высказываний -- это объединение множества точек программы и всевозможных булевых высказываний над переменными программы:
-
- Состояния вида размечаются высказываниям о точке программы, в которой мы находимся и всеми высказываниями из множества всевозможных высказываний, которые верны в этой подстановке:
-



Пример: Лекция 4, слайд 16
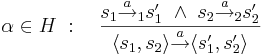
Параллелизм. Чередование систем переходов.
Лекция 4, слайды 21-24
- Действия независимых процессов чередуются.
- Порядок выполнения процессов не известен.
Чередование:
- эффект от параллельного выполнения независимых действий a и b равен эффекту от их последовательного выполнения в произвольном порядке:
- Effect(alllb,n) = Effect((a;b) + (b;a),n)
- lll -- оператор чередования
- ; -- оператор последовательного выполнения
- + -- оператор недетерминированного выбора
- Effect(alllb,n) = Effect((a;b) + (b;a),n)
Пример -- слайд 23
Чередование систем переходов



Параллелизм. Чередование графов программ. Случаи без разделяемых переменных и с разделяемыми переменными.
Параллелизм. Синхронный параллелизм. Рандеву.
- распределённые программы выполняются параллельно
- в распределённой программе нет разделяемых переменных
Передача сообщений в распределённых программах:
- cинхронная передача сообщений (рандеву)
- асинхронная передача сообщений (кналы)
Синхронный обмен сообщенийями:
- Процессы вместе выполняют синхронизированные действия
- Взаимодействие процессов - одновременно
Рандеву


Тогда  , где
, где
-

-
 определяется как:
определяется как:
- интерливинг для
 и
и 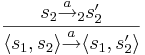
- рандеву для
- интерливинг для
Пример рандеву: Лекция 4, слайд 32
Синхронный параллелизм

Тогда  , где
, где
-
- определяется как:
Параллелизм. Асинхронный параллелизм. Системы с каналами. Операционная семантика.
Абстракция. Абстракция трасс. Абстракция системы переходов. Необходимое и достаточное условие корректности LTS модели.
Представим трассу в форме интерпретации I: 
-
 - множество натуральных чисел
- множество натуральных чисел
-
 - отношение порядка на
- отношение порядка на
-
 (для каждого порядкового номера говорит истенен или ложен заданный на нем предикат)
(для каждого порядкового номера говорит истенен или ложен заданный на нем предикат)
Рассмотрим трассы tr и tr' такие, что


Будем говорить, что трасса tr' является абстракцией трассы tr ( ), если
), если
-

-
 такое, что
такое, что  - некоторая неубывающая функция [?]
- некоторая неубывающая функция [?]
-

Пример абстракции трассы: Лекция 2, слайд 53
Необходимое условие корректности модели -  , где
, где
- P - система
- M - модель этой системы
При этом, если - некоторое свойство системы, то  выполняется тогда и только тогда, когда верно условие корректности модели.
выполняется тогда и только тогда, когда верно условие корректности модели.
Абстракция. Абстракция системы переходов. Достаточное условие корректности LTS модели. Адекватность LTS модели.
Абстракция системы переходов -- картинка на 4 слайде 3-й лекции.
Достаточное условие корректности LTS модели.
Пусть у нас имеются две системы переходов, TS1 и TS2 -- для системы и модели соответственно:

Достаточное условие корректности:
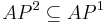
- Алфавит предикатов модели включен в алафвит предикатов системы:
- Задано отображение
 . На отображение накладываются следующие условия:
. На отображение накладываются следующие условия:
- Оно преобразует начальное состояние системы в начальное состояние модели:

- Каждому переходу из системы должен соответствовать переход в модели:

- Оно преобразует начальное состояние системы в начальное состояние модели:
- Метки на состояниях модели должны состоять только из предикатов модели:

Необходимое (но не достаточное) [?] условие адекватности модели свойствам правильности :
Алфавит предикатов свойств правильности включен в алфавит предикатов модели.
Абстракция. Абстракция графов программ. Отношение слабой симуляции.
Логика LTL, автоматы Бюхи
Свойства правильности. Формулирование требований правильности программы. Двойственность. Типы свойств.
Требования правильности -- утверждения о возможных и невозможных вариантах выполнения программы.
Двойственность :
- если какое-то утверждение невозможно, то обратное -- неизбежно
- если какое-то утверждение неизбежно, то обратное -- невозможно
- при помощи логики от одного можно переходить к другому при помощи отрицания
Способы описания свойств правильности:
- свойства достижимых состояний (свойства безопасности)
- свойства последовательности состояний (свойства живучести)
- в Promela:
- свойства состояний
- asserts
- локальные ассерты процессов
- инварианты системы процессов
- метки терминальных состояний
- задаём допустимые точки останова прочесса
- asserts
- свойства последовательностей состояний
- метки прогресса - чтобы найти циклы бездействия
- утверждения о невозможности (never claims) - например, LTL формулы
- трассовые ассерты
- свойства состояний
Свойства правильности. Свойства безопасности и живучести. Проверка таких свойств. Примеры свойств.
Типы свойств:
- свойства безопасности
- ничего плохого никогда не произойдет
- пример: инвариант системы (например, x всегда меньше y);
- задача верификатора -- найти те вычисления, которые ведут к нарушению безопасности.
- свойства живучести
- рано или поздно произойдет что-то хорошее
- пример: “отзывчивость” (например, если отправлен запрос, то рано или поздно будет сгенерирован ответ)
- задача верификатора – найти вычисления, в которых это “хорошее” может откладываться до бесконечности.
Автоматы Бюхи. Конечные автоматы. Проход автомата. Язык автомата.
Лекция 6, слайды 8 - 15
Конечный автомат
описывается сигнатурой:  , где
, где
- S -- множество сотояний
- -- множество начальных состояний
- L -- конечное множество меток
-
 -- множество терминальных состояний
-- множество терминальных состояний
-
 -- отношение перехода на состояниях
-- отношение перехода на состояниях
Детерминизм и недетерминизм
Конечный автомат называется детерминированным, если по метке и исходному состоянию можно однозначно определить целевое состояние:

В противном случае автомат называется недетерминированным.
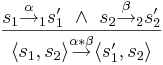
Проходом a конечного автомата называется такое упорядоченное и, возможно, бесконечное множеств переходов из T:

Допускающим проходом конечного автомата A называется конечный проход a, финальный переход которого
(sn − 1,ln − 1,sn) ведёт в терминальное состояние.
Языком автомата A называется множество слов в алфавите A.L, соответствующих допускающим проходам автомата А
Автоматы Бюхи. Омега-допускание. Расширение автоматов Бюхи.
Лекция 6, слайды 16
Допускающий проход по Бюхи(w-допускание) конечного автомата A называется такой бесконечный проход a, что 
т.е. по крайней мере одно терминальное состояние встречается бесконечно часто.
Расширение автоматов Бюхи.
Конечные проходы дополняются бесконечным переходом по пустому действию. При помощи автоматов Бюхи удобно проверять свойства живучести.
Логика LTL. Синтаксис LTL. Семантика выполнимости формул. Сильный и слабый until.
Лекция 6, слайды 30 - 35
Особенности LTL:
- может использоваться для описания свойств как живучести, так и безопасности
- описывает свойства, которым должны удовлетворять линейные последовательности наблюдаемых состояний - трассы
- семантика LTL определена на бесконечных автоматах Бюхи. Для конечных проходов необходимо использовать расширение автоматаю
Формула в LTL f::=
- p, q, ... -- свойства состояний, включая true и false
- (f) -- группировка при помощи скобок
-
 -- унарные операторы
-- унарные операторы
-
 -- бинарные операторы
-- бинарные операторы
Операторы в LTL
- унарные
-
 ([]) -- всегда в будущем
([]) -- всегда в будущем
-
 (<>) -- в конце концов
(<>) -- в конце концов
- X (X) -- в следующем состоянии
-
 (!) -- логическое отрицание
(!) -- логическое отрицание
-
- бинарные
- U (U) -- до тех пор, пока
-
 (&&) -- логическое И
(&&) -- логическое И
-
 (||) -- логическое ИЛИ
(||) -- логическое ИЛИ
- (->) -- логическая импликация
-
 (<->) -- логическая эквивалентность
(<->) -- логическая эквивалентность
Сильный Until:
- всегда e, до тех пор, пока не f, при этом f обязательно должно наступить
-

Слабый Until:
- всегда e, до тех пор, пока не f, при этом не факт, что f наступает (тогда всегда e)
-

Выполнимость формул:
- Задаётся последовательность состояний прохода σ
-
 Внимание!! это слишком смахивает на бред, который должен быть интуитивно понятен. Если кто может - распишите подробнее выполнимость!!
Внимание!! это слишком смахивает на бред, который должен быть интуитивно понятен. Если кто может - распишите подробнее выполнимость!!
Логика LTL. Основные типы свойств LTL. Цикличность, стабильность, инвариант, гарантия, отклик, приоритет, корреляция.
Лекция 6, Слайды 38-39
| Формула | Описание | Тип | |
|---|---|---|---|
 | всегда p | инвариант | |
 | рано или поздно p | гарантия | |
 | если p, то рано или поздно q | отклик | |
 | если p то затем q и рано или поздно r | приоритет | |
 | всегда рано или позндно будет p | цикличность (прогресс) | |
 | рано или позндно всегда будет p | стабильность (бездействие) | |
 | если рано или поздно p, то рано или поздно q | корреляция |
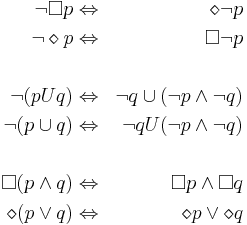
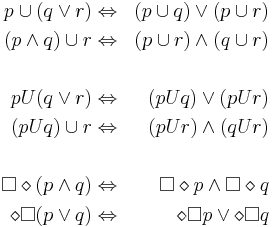
Логика LTL. Эквивалентные преобразования формул LTL.
Лекция 6, Слайды 40
|
|
|
Логика LTL. Оператор neXt. Свойства, инвариантные к прореживанию.
Оператор X нужно использовать аккуратно:
- с его помощью делается утверждение о выполнимости формулы на непосредственных потомках текущего состояния,
- в распределённых системах значение оператора X неочевидно,
- поскольку алгоритм планирования процессов неизвестен, не стоит формулировать спецификацию в предположении о том,
какое состояние будет следующим,
- стоит ограничиться предположением о справедливости планирования.
Свойства, инвариантные к прореживанию
- Пусть f – трасса некоторого вычисления над пропозициональными формулами P,
- по трассе можно определить, выполняется ли на ней темпоральная формула,
- трассу можно записать в форме:
 -- где значения пропозициональных формул на каждом интервале совпадают.
-- где значения пропозициональных формул на каждом интервале совпадают.
- Обозначим E(f) набор всех трасс, отличающихся лишь значениями n1,n2,n3 (т.е. длиной интервалов).
- E(f) называется расширением прореживания f.
- Свойство ψ, инвариантное к прореживанию, либо истинно для всех трасс из E(ψ), либо ни для одной из них:
-
- истинность такого свойства не зависит от длины трассы, а только от порядка, в котором пропозициональные формулы

меняют свои значения;
- Теорема: все формулы LTL без оператора X инвариантны к
прореживанию.
Логика LTL. Проверка выполнимости формул LTL при помощи автоматов Бюхи. Проверка LTL-формул в Spin.
Логика LTL. Выразительная мощность LTL. Логики LTL + существование, CTL* и CTL. Сравнение выразительной мощности.
Верификация программ на моделях
Задача проверки правильности программ. Валидация. Верификация. Системы с повышенными требованиями к надёжности. Реактивные программы. Параллельные программы. Особенности верификации таких программ.
Валидация - исследование и обоснование того, что спецификация ПО и само ПО через реализованную в нём функциональность удовлетворяет ребованиям пользователей.
Верификация - исследование и обоснование того, что программа соответствует своей спецификации.
Верификация в общем случае алгоритмически неразрешима.
Методы верификации:
- "Полное" тестирование (слайды 14-22)
- Имитационное моделирование
- Доказательство теорем (27-29)
- Статический анализ (30-33)
- Верификация на моделях (34-38)
Типы программ:
- Традиционные программы
- завершимость
- спецификация включает в себя описание входа/выхода программы
- число состояний зависит от входных данных и переменных
- Реактивные программы
- работают в бесконечном цикле
- взаимодействуют с окружением
- спецификация представляет собой пары стимул/реакция
- Параллельные программы
- совместная работа нескольких компонент
- невоспроизводимость тестов
- ограниченные возможности по наблюдению
Подходы к верификации программ. Тестирование и имитационное моделирование. Область применения, плюсы и минусы. Проблема полноты тестового покрытия.
Подходы к верификации программ. Доказательство теорем. Область применения, плюсы и минусы.
Основные пункты:
- система и её свойста - формулы
- задан набор аксиом и правил вывода
- строится доказательство свойства-теоремы
- таким образом, производится качественный анализ системы
Пример: Лекция 1, слайд 28
Достоинства:
- работа с бесконечными пространствами состояний
- даёт более глубокое понимание системы
Недостатки
- медленная скорость работы
- может потребоваться помощь человека (построение инвариантов циклов)
- в общем случае нельзя построить полную систему аксиом и правил вывода
Подходы к верификации программ. Статический анализ исходного кода программ. Область применения, плюсы и минусы.
Статистический анализ -- оцениваем для каждого состояния программы потенциально возможные значения переменных.
Пример: Лекция 1, Слайды 31-32
Особенности:
- анализ исходного текста без запуска программы
- в общем случае задача неразрешима
Достоинства:
- высокая скорость работы
- если ответ дан - ему можно верить
Недостатки:
- узкая область применения: компиляторы, анализ похожести кода, анализ безопасности
- ручная настройка при изменении применяемых свойств
Подходы к верификации программ. Верификация программ на моделях. Процесс верификации программы при помощи её модели. Область применения, плюсы и минусы.
Лекция 1, Слайды 34-38 , 45
Особенности:
- проверка свойств на конечной модели
- исчерпывающий поиск по пространству состояний
- свойства задаются в терминах значений предикатов состояний программы или последовательности этих значений
Пример: Лекция 1, слайды 35-36
Процесс верификации программ на моделях:
- моделирование
- построение адекватной, корректной модели
- фильтрация "лишних" состояний
- спецификация свойств
- темпоральная логика
- полнота свойств
- верификация
- построение контр-примера
- анализ контр-примера
Достоинтсва:
- хорошая автоматизация
- если модель конечна, корректна и адекватна данному свойству, то будет получен точный ответ
- выявление редких ошибок
Недостатки:
- работает только для конечных моделей
Области применения
- сетевые и криптографические протоколы
- протоколы работы кэш-памяти
- интегральные схемы
- стандарты
- встроенные системы
- драйвера
- и прочие программы на C
Верификация на моделях. История развития верификации программ на моделях. Схема верификации программ на моделях. Классы проверяемых свойств правильности программы.
Лекция 1, Слайды 40-44
Лекция 2, Слайды 3-4
Примеры классов свойств:
- Стандартные
- Специфичные для конкретного приложения
- требования справедливости
- корректная завершаемость
- причинно-следственный и темпоральный порядок состояний системы
Схема верификации на модели: Лекция 2, слайд 3
Верификация при помощи Spin. Задание свойств состояний.
Cвойства состояний
- asserts
- локальные ассерты процессов
- инварианты системы процессов
- active proctype invariant() { assert(something)}
- метки терминальных состояний
- задаём допустимые точки останова процесса
- метка end -- система не может завершить работу без того, чтобы все активные процессы либо завершились, либо остановились в точках, помеченных метками end;
- задаём допустимые точки останова процесса
Верификация при помощи Spin. Задание свойств последовательностей состояний. Циклы бездействия. Ограничения справедливости.
Верификация при помощи Spin. Задание свойств последовательностей состояний. Утверждения о невозможности. Трассовые ассерты.
never claims (утверждения о невозможности):
- выполняются синхронно с моделью,
- если достигнут конец, то – ошибка,
- состоят из выражений и конструкция задания
потока управления
- фактически, описывают распознающий
автомат.
Конструкция never
- может быть как детерминированной, так и нет;
- содержит только выражения без побочных эффектов (соотв. булевым высказываниям на состояниях);
- используются для описания неправильного поведения системы;
- прерывается при блокировании:
- блокируется => наблюдаемое поведение не соответствует описанному,
- паузы в выполнении тела never должны быть явно заданы как бесконечные циклы;
- never нарушается, если:
- достигнута закрывающая скобка,
- завершена конструкция accept (допускающий цикл);
- бездействие может быть описано как конструкция never или её часть (для цикла бездействия есть тело never по умолчанию).
Видимость
- все конструкции never – глобальны;
- тем самым, в них можно ссылаться на
- глобальные переменные,
- каналы сообщений,
- точки описания процессов (метки),
- предопределённые глобальные переменные,
- но не локальные переменные процессов;
Ассерты на трассы Используются для описания выполнения прывильных и неправильных последовательностей операторов send и recieve


